INTEC Solar Feasibility (Ongoing)
Developing a utility-scale solar PV and battery feasibility framework in partnership with INTEC Energy Solutions, integrating grid modelling, system design, and financial viability assessment.
Read moreSelected embedded and control-focused projects.
Developing a utility-scale solar PV and battery feasibility framework in partnership with INTEC Energy Solutions, integrating grid modelling, system design, and financial viability assessment.
Read more
Completed Level 1 rocketry by designing, simulating, and launching a certification rocket with a custom PCB flight computer for telemetry and recovery.
Read moreReal-time step counting on STM32C071 (Cortex-M0+). LSM6DS IMU over SPI, 20-sample moving-average filter, peak–valley FSM detection at 50 Hz, OLED display + RGB LEDs + PWM buzzer. Cooperative scheduler, DMA for ADC and I²C, modular bare-metal C architecture.
Read more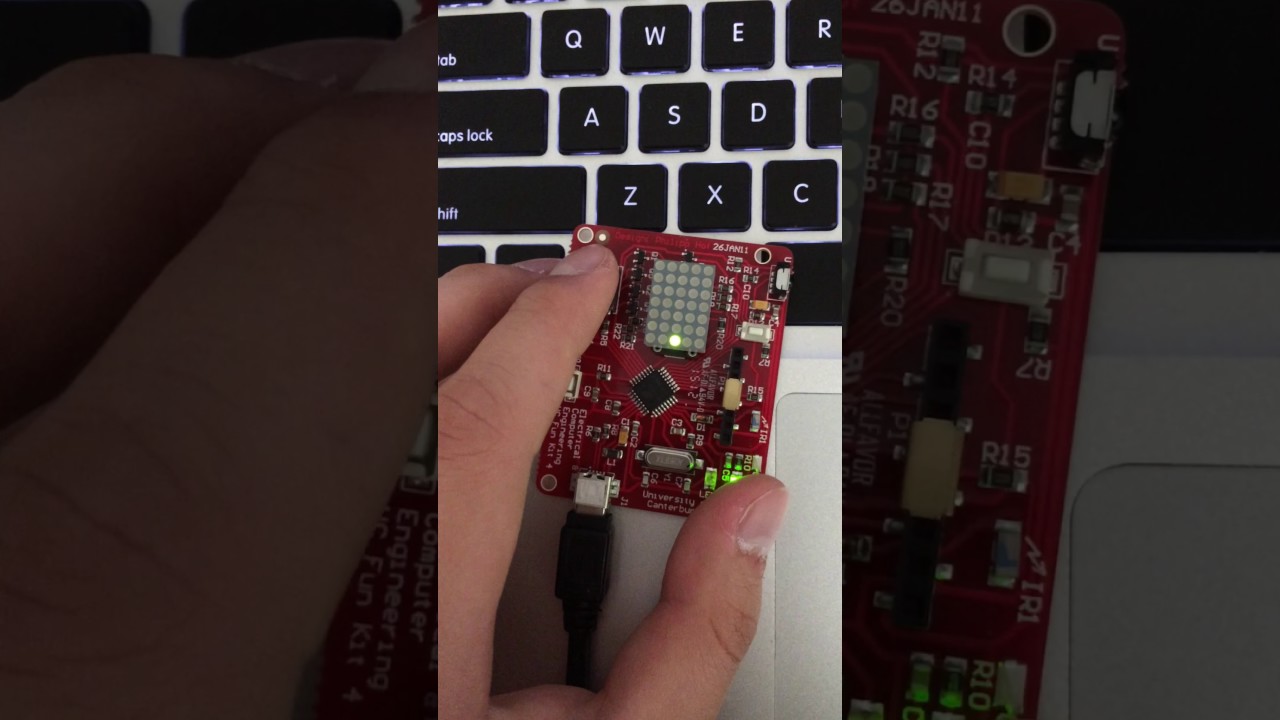
Two-player embedded game on the UCFK4 AVR platform (ENCE260, team of 2). Real-time IR communication between boards, deterministic FSM, LED matrix display rendering, and modular C firmware architecture with explicit hardware abstraction.
Read moreA remote control car steered by head movement tilt your head and the car follows. The system uses two custom PCBs: one mounted on the car and one worn on a hat that detects head orientation and transmits commands wirelessly. Both are built around ARM Cortex-M4 microcontrollers with motor control, radio communication (NRF24L01+), power regulation, and sensing. The car also carries a Nano Cam 2 with a 5.8 GHz VTX module (salvaged from a Tiny Hawk drone), transmitting a live FPV feed so the driver can wear goggles and see exactly what the car sees.
Read more
Group project within ENEL471 – Power Electronics 2 (Semester 2 2026). Design and build of a high-power electric go-kart drive system: converter topology selection, state-space modelling, feedback compensation, current-mode control, SVPWM motor control, and thermal/EMI design.
Read more
Technical design project within ENEL667 – Renewable Electricity System Design (Semester 2 2026). System-level renewable network design covering generation sizing, energy storage integration, grid integration via power electronics, protection and control, and distributed generation analysis.
Read more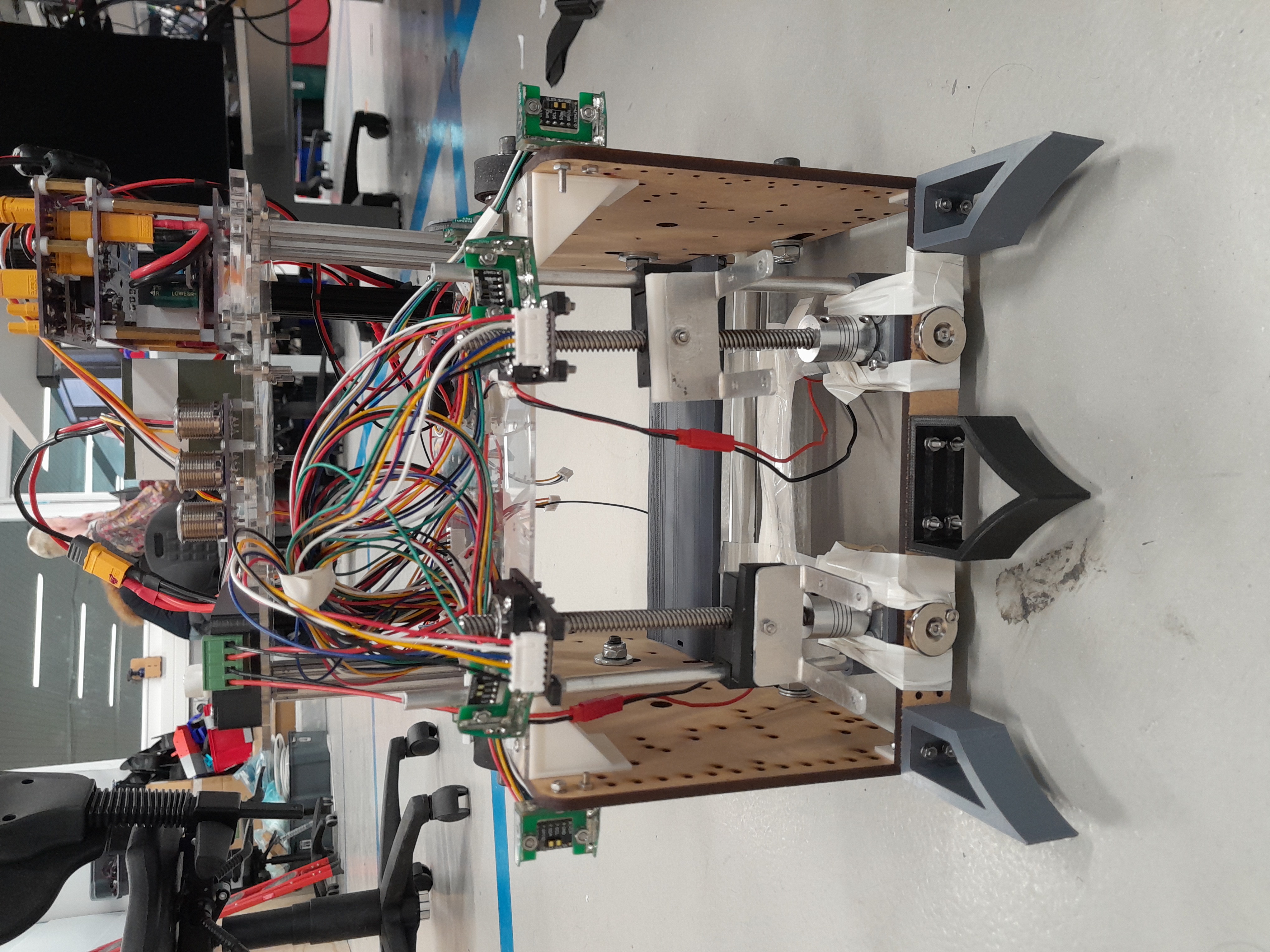
Autonomous weight-collecting RoboCup robot (team of 3). Teensy 4.0 at 600 MHz, 8 × ToF sensors with weighted fusion, three-layer hierarchical state machine, dual pickup system, and real-time task scheduling. I owned the embedded architecture, state machine design, sensor fusion, and calibration tooling.
Read more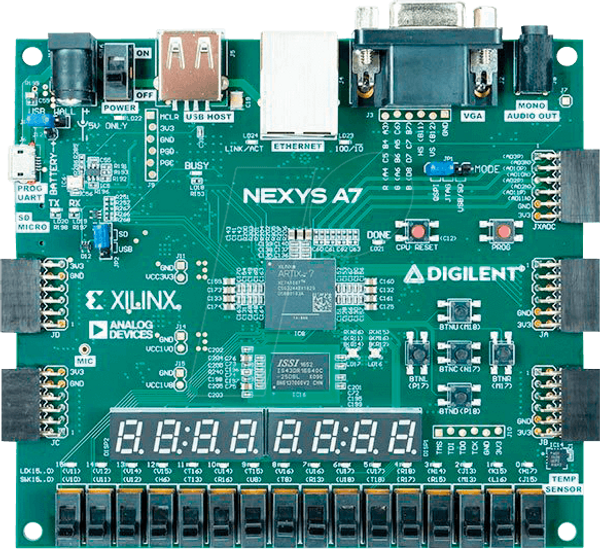
Programmed a reaction timer on a Nexys-4 DDR FPGA using VHDL. Implemented a finite state machine, arithmetic logic unit, pseudo-random generator, and 7-segment display interface.
Read more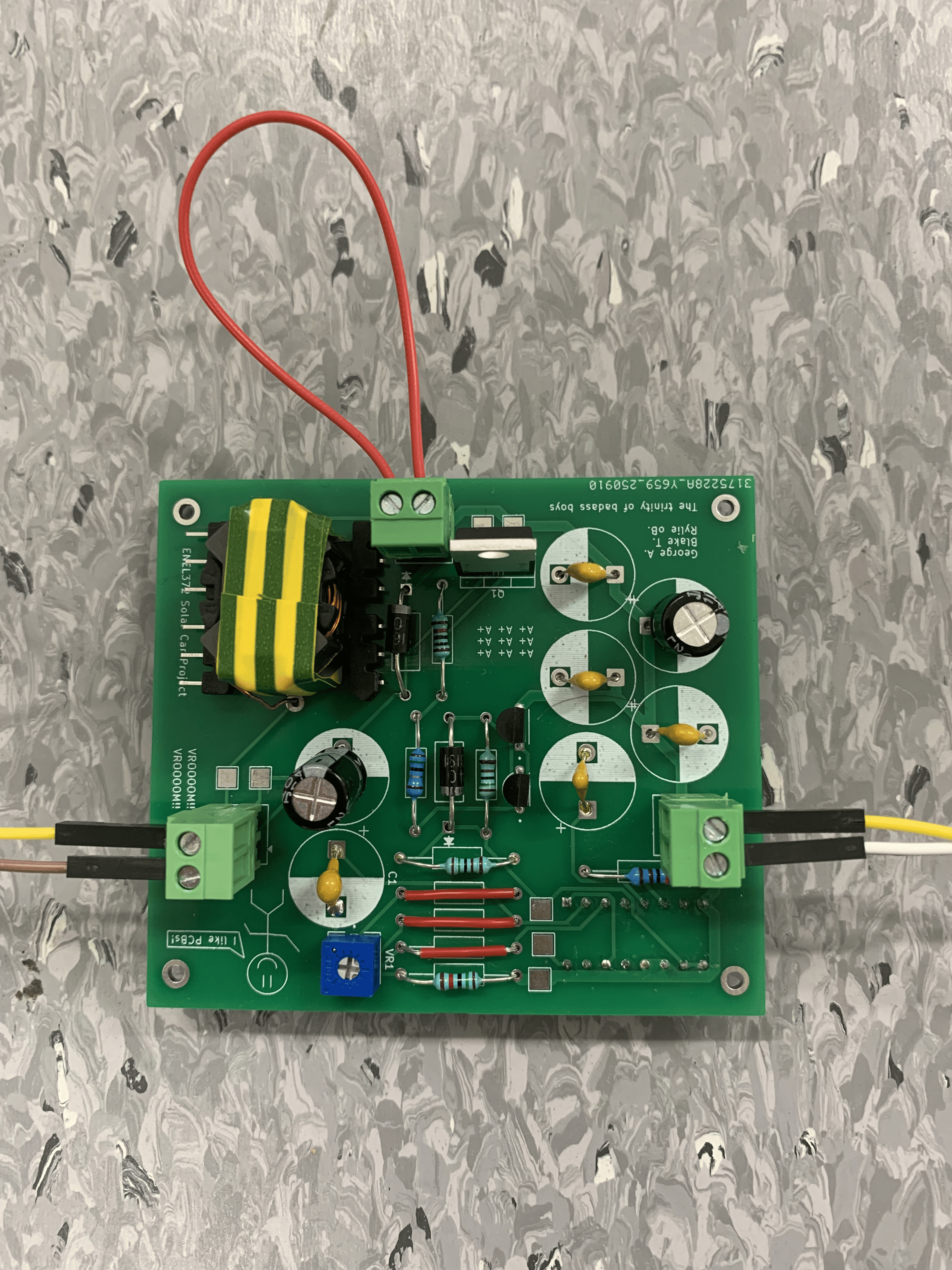
Designed, simulated, and built electronic hardware enabling a DC motor to run directly from a solar panel.
Read more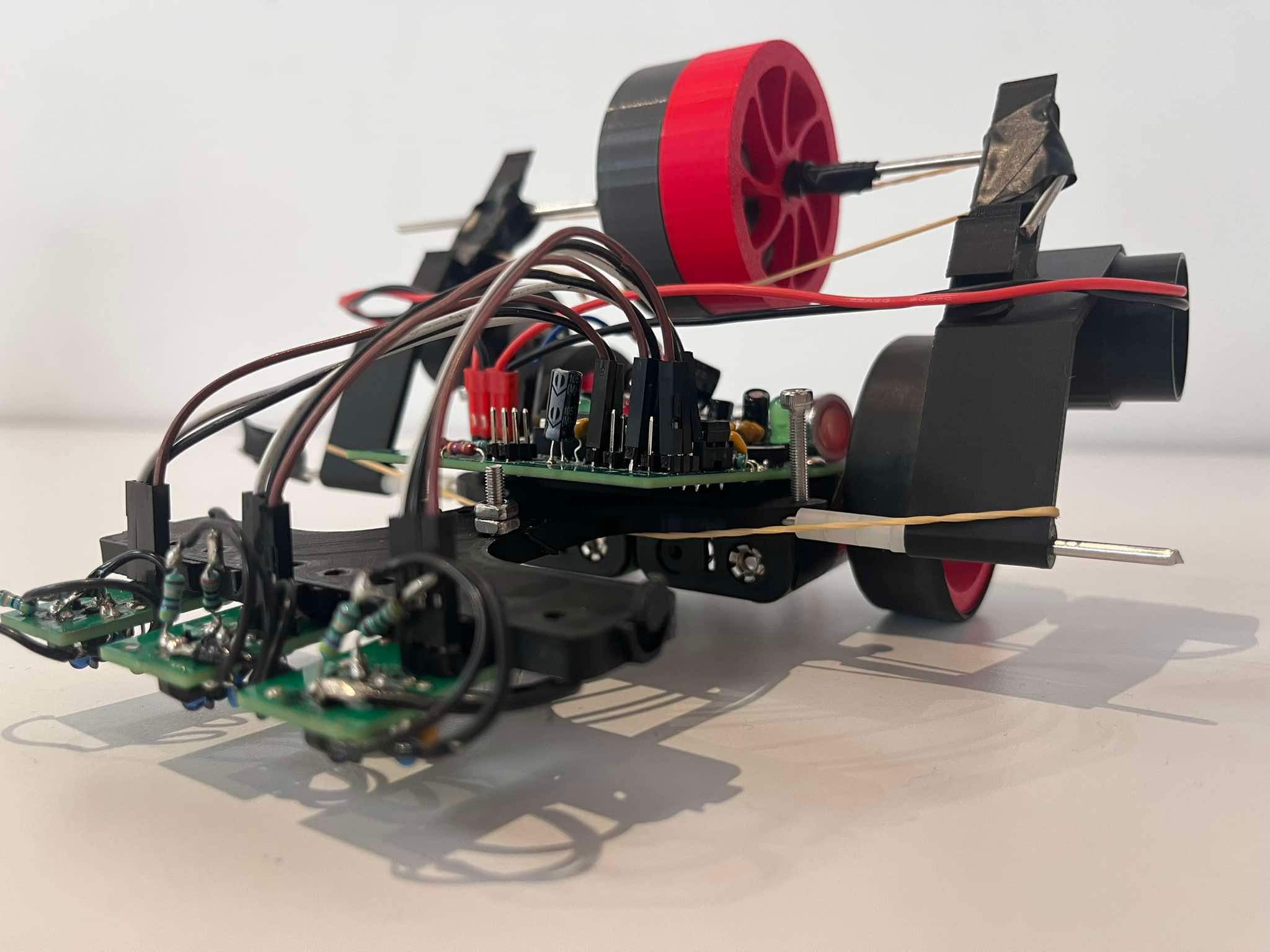
8th out of 36 teams at the LFR competition (14.939 s). Custom KiCad PCB with MOSFET motor drivers, TCRT5000 optical sensors, and reactive closed-loop control firmware on an ATmega328. Designed the PCB, debugged hardware faults, and implemented the control algorithm.
Read moreOmron PLC control system for a physical elevator rig (ENMT211, team of 2). Custom motion controller (accel/decel/hold), encoder-based floor positioning, door interlock logic, and direction-based scheduling FSM — all under MCU safety supervision.
Read more